Mihotel
Mihotel Project Document.
📊 View our ZenHub Workspace
🌏 View our patio interactively (it may take seconds to load the model)
🎥 View our simulations
Table of Contents
- ✔️ Highlights
- ⚠️ Precautions
- 🐛 Known Problems
- Configurations
- 🔍 Output Description
- Solution
- Development Strategy
- Personnel Division
- Project Specifications
- Tasks
- 报销流程及要求
- 支出信息公开
✔️ Highlights
- Fulfill all requirements
- good and fancy format of slides and report earns points
- notice content organization of slides and report, may need to discuss the content by hardware and software even if in a module
- Slides and report should be intuitive, beautiful, clear tables and schematic diagram are welcome
⚠️ Precautions
- Consider purchasing spare parts when buying vulnerable components
- focus on project progress
- we should get most design done until week 9. Because we need to leave time for mid-term review, we need to avoid week 11-13 (or even earlier). However demo video is needed in week 15, which means there’s only 2 weeks left after week 9…
- be care of team communication and convergence
- need more hang outs 🍻
🐛 Known Problems
- It seems that webots does not support a multiprocessing controller, since I did not find a way to stop all child processes when simulation is paused.
- A few factors influent webots simulation speed:
- factors listed by webots here
- number of complex sensors initialed
- get value from sensors frequently
basicTimeStepin WorldInfo- time step of controller
- output frequently
- multiprocessing controller
- A few factors influent webots simulation precision:
- factors listed by webots here
- webots claims bug on Orientation Dependent Friction
- very high
basicTimeStepor time step of controller - too complex world
- performance of the computer…
- I suppose there is delay in the queues when the computer overloads 😓
Configurations
List of tools, modules with their version
| Item | Version | Notes |
|---|---|---|
| Simulation | Webots R2020b | we are using a very new version of Webots Nightly Build (24-4-2020) |
| Python | >3.6 | |
| numpy | 1.17 | Numpy module for python |
| opencv-contrib-python | 4.2.0.32 | OpenCV module for python |
🔍 Output Description
| Style | prefix | Description |
|---|---|---|
| Bright Green | [Info] | |
| Bright Red | [Debug] | debug information, the difference against info is that, this should not show up unless is debugging |
| Bright Blue | [Command] | command given to chassis |
| Bright Yellow | [Detected] | detect of object |
Solution
System
Structure
The system sets up 3 child processes, one for chassis controlling, one for decision, one for detection.
gray boxes are shared variables between processes

Communication
Queue
Four queues, signal_queue, command_queue, sensors_queue, motors_queue are used for communications between processes. Although it seems when there is only two endpoints to communicate, Pipe() is a faster choice, but it seems the code could be prettier with Queue().
❗️ notice that once Queue.get() is used, one item in the queue is taken out and returned, which means it is not in the queue anymore and you could not get it again with Queue.get(). Queue.empty() could be used to detect whether it is empty.
Shared variables
A few shared variables are created to share some flags and signals between processes. So far flag_patio_finished, flag_pause, key are used.
📚 document for multiprocessing.Value()
Here is a list of one character typecode can be used in multiprocessing.Value() to determine type of the shared variable.
How it ends
the main process ends when flag_patio_finished turns to True. Now all three child processes are set to daemonic child process by Process.daemon = True, therefore, the child processes will be terminated as soon as the main process completes.
❗️Note that the main process could NOT exit until all queues are closed.
📚 document for multiprocessing.Queue()
📚 Things I Wish They Told Me About Multiprocessing in Python
ANSI codes in webots console
Keyboard event
Chassis
A four-wheel drived chassis, which mean speed of each wheel is set separately.
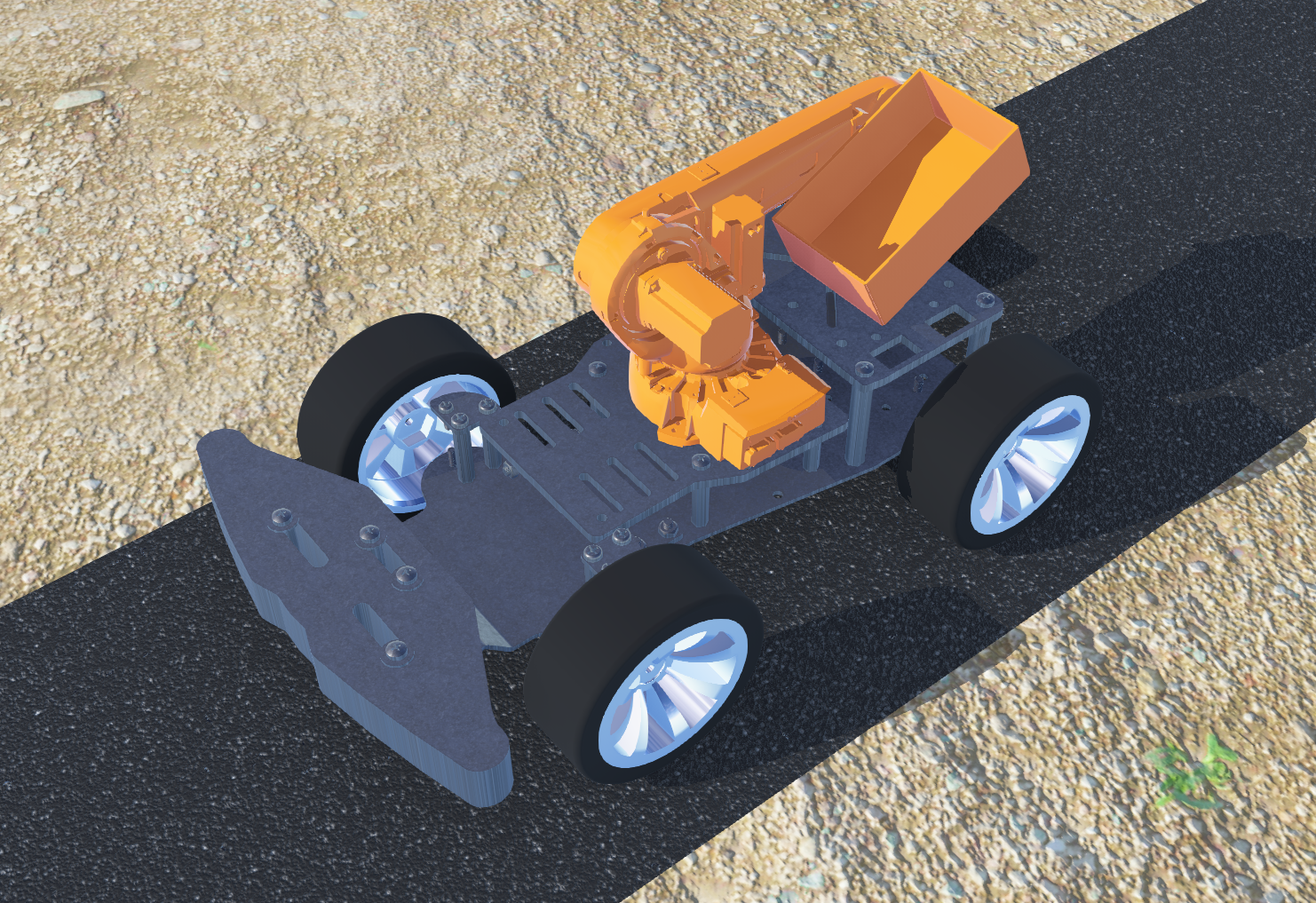
Body
| Item | Measurement | Note |
|---|---|---|
| Size | 0.15m, 0.23m, 0.05m | width, length, height |
| Density | $7.85 \times 10^3kg/m^3$ | Density of metal |
Wheels
| Item | Measurement | Note |
|---|---|---|
| Radius | 0.033m | |
| Max Velocity | 100rad/s | the rover moves forward when velocity is negative |
| Max Torque | 100N⋅m | |
| Front Track | 0.12m | Vertical distance from center is 0.068 m |
| Rear Track | 0.12m | Vertical distance from center is 0.07 m |
| Motor Control Method | velocity control | PID is not used in velocity control. See here for doc |
Arm
| Item | Measurement | Note |
|---|---|---|
| Density | $0.8 \times 10^3 kg/m^3$ | Density of plastic |
| Arm Length | 0.035m | From axis of Elbow Motor to axis of Wrist Motor |
| Max Velocity | 20rad/s | |
| Max Torque | 10N⋅m | |
| Holder Size | 0.04m, 0.066m, 0.024m | width, length, height |
Visual & Sensor
📑 Basic usage of several sensors
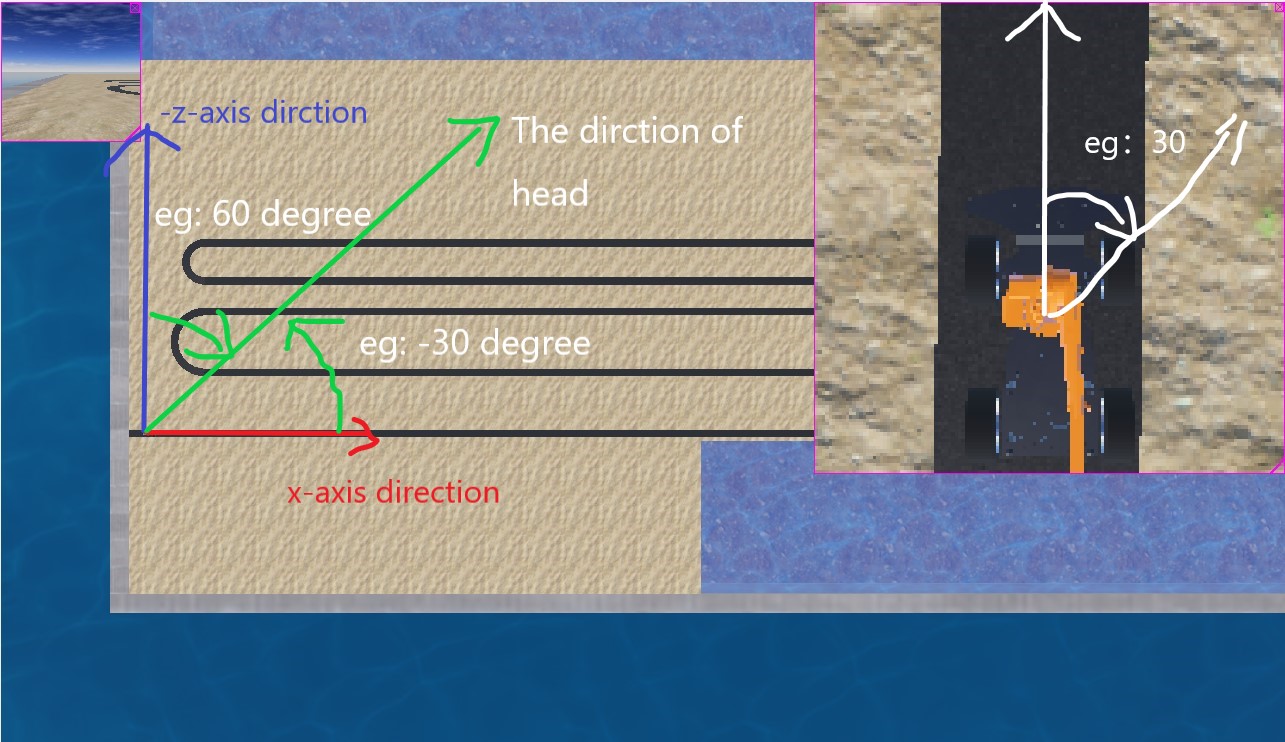
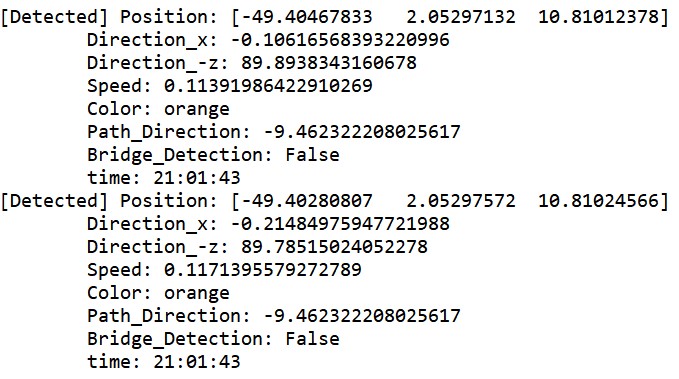
The illustration of the signals we get:
| Name | Data Type | Description |
| —————- | ————————— | ———————————————————— |
| Position | [float, float, float] | The position of the robot which is same with translation |
| Speed | float | A float in m/s |
| Bridge_Detection | bool | If the bridge is in the right position, return True |
| Gate_Detection | bool | If the bridge is in the right position, return True |
| Color | str | The predefined string that indicate the color |
| Direction_x | float | Ranges of (-180, 180]. Indicating the degree that the head deviate from x-axis |
| Direction_-z | float | Ranges of (-180, 180]. Indicating the degree that the head deviate from -z-axis |
| Path_Direction | float/None | Range of approximately [-54.88, 54.88]. A float number that indicates the degree that the path-direction deviates from the head direction. If there is no path, None is returned. |
⚠️ Noticing that, the right deviation is positive and the left deviation is negative.
⚠️ Noticing that, the original signal of bridge and gate detection is False. Once the object is detected, the corresponding signal will turn to True and the detection function will not process again.
Path Camera Parameters
| Item | Measurement | Note |
|---|---|---|
| Height | 0.553m | Height of camera center to the ground |
| Position | 0.1m | From center of the rover to the front |
| depression angle | 1.57rad | From horizontal axis to down |
| Field of View | 0.9 | |
| Size | 138*138 | It seems there are some black pixels at the edge, so 5 pixels are cut off at each edge when passed into the program |
| Actual Size of ROI | 0.52m, 0.21m | Width and length of the wood board below |
Decision




Environment
Specifications
| Item | Measurement (x, y, z) (m) | Note |
|---|---|---|
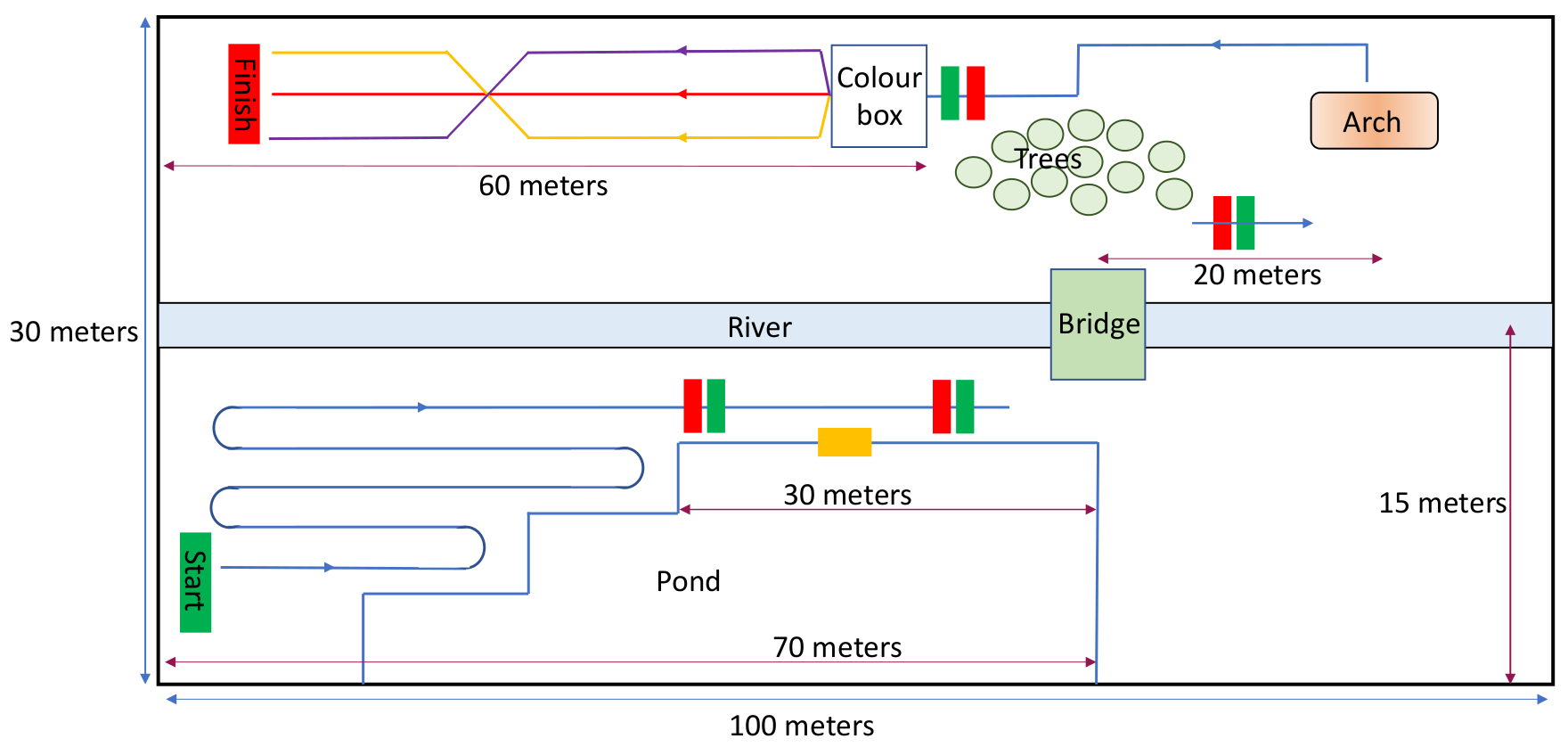
| Patio | 100, 2, 30 | With wall of height , thickness of 2m, 0.5m |
| Pond | 55, 1.9, 9 | |
| River | 100, 2, 2 | |
| Asphalt Road | width: 0.2 | At height of 2.002. Radius of the Curve is 0.8m |
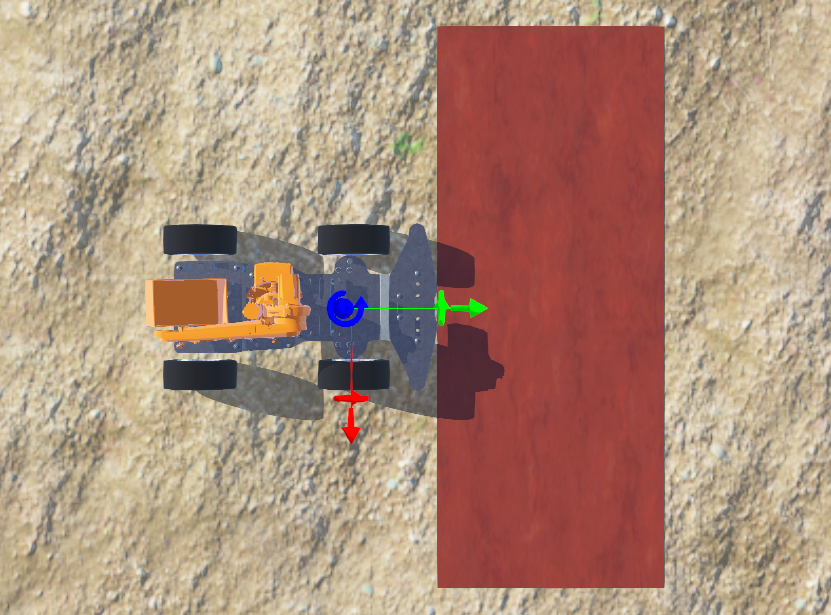
| Orange Box | 0.1, 1 | Width and length. Actual color (r, g, b): 245, 121, 0. height of top is about 8.7mm above the ground, slope of about 7.5 degree |
| Bridge | 0.1, 0.338, 2.8 | Slope is 20 degree, made of three 1, 0.1, 1 boxes |
| Color Box | 0.2, 0.6 | Width and length |
| Color Road | width: 0.05 | Colors: yellow (255, 255, 0), red (255, 0, 0), purple (153, 0, 255). Intersection angle of red and yellow path is 0.25rad |
| Fish Food | radius: 0.005 | mass: 0.01g, 18 balls in total. High total mass weaken the steering performance |
Development Strategy
A regular automatic system development looks like this👇

But since we don’t have much experience and we don’t have very long time, we do it like this👇, start from the two green circles at the same time, which saves our time and gives us more chances to adjust the design.

Personnel Division
- Tech Lead: 宋铸恒
- Chassis: 王灏天 史超凡
- Electrical
- Environment: 褚进炜 熊汇雨
- Document
- Project Manager: 褚进炜
📑 detail
Project Specifications
First a homemade simulation environment, a.k.a. the patio is needed.
The required patio is shown below. Explicit labeled measurements can not be changed.
❗️ the green and red boxes are just for illustration, should not really appear.
| Item | Measurement |
|---|---|
| Rover | maximum of 50x50 cm |
| Bridge | 100 cm wide, 3 m long |
| Arch | 100 cm wide, 100 cm high (suggested) |
Tasks
Task1
From the start point get to the first red box following the line.
💡 although there should not really be a red box, but can be set and measured by distance.
Task2
Release a kiwi into the pond when the orange box is detected.
Task3
Detect the bridge and go across it, the get to the right of the trees.
💡 Here a beacon could be used to avoid tree recognition.
Task4
Detect the arch and get through it. Then follow the line to the color box.
Task5
recognize color of the color box and follow the line in same color to the end.
💡 Color of the color box could be set manually.
报销流程及要求
学院对于本课程采取凭发票报账报销政策,需组员在购买过程中按照学院要求开具增值税发票.
具体报账要求详见 📑报账.md
支出信息公开
本栏目每周更新一次, 旨在进行项目支出信息公开.
具体支出明细详见 📑信息公开.md